Small-Scale Underwater Glider
An underwater glider is a non-tethered, autonomous robot that has no propeller and uses very little energy. It moves by changing its buoyancy, often by taking in or expelling water. This change in buoyancy causes the glider to rise and sink in the water. As the glider travels up and down, its wings generate lift, which propels the glider forward.

Underwater gliders can run for months at a time and cover great distances on very little power. Underwater gliders carry sensors that can help scientists better understand and model the ocean. In 2009, Rutgers University’s Scarlet Knight (RU 27) became the first AUV to cross the Atlantic Ocean. It made 11,000 dives and 11,000 ascents to the surface during its 221-day voyage that covered approximately 7,400 km.

SeaGlide drawing the attention of an Emperor fish at the Great Barrier Reef in Australia
Carderock’s small-scale underwater glider, SeaGlide, operates on the same basic principles as the Scarlet Knight. It has a buoyancy engine, pitch control, wings, and a rudder, as well as sensors. With lift provided by its wings, it glides forward both as it dives and as it rises. A pressure sensor collects data to determine depth and position over time. This information can be correlated with data from a temperature sensor.
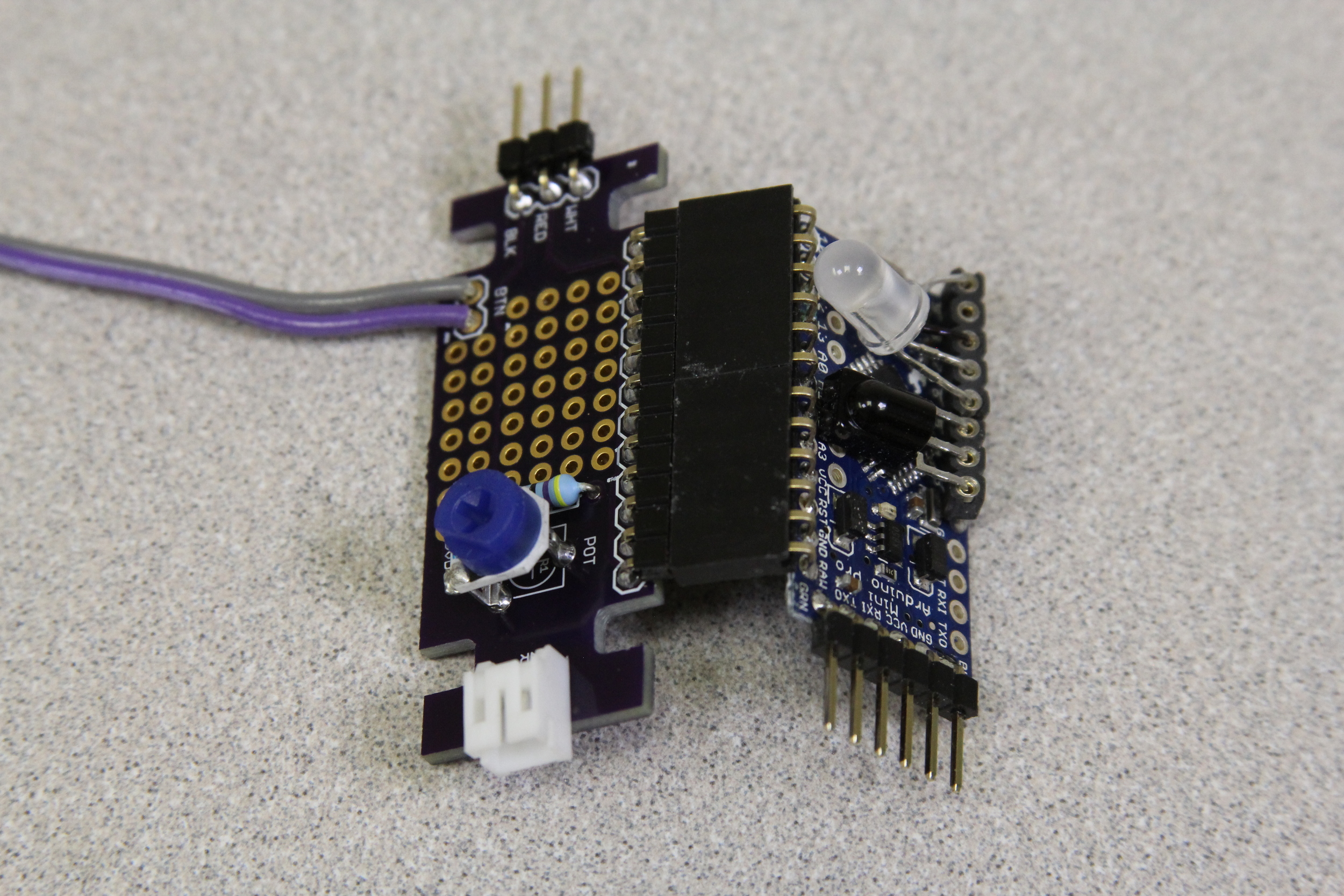
SeaGlide's Control Electronics - Printed Circuit Board (left) and an Arduino Pro Mini Microcontroller (right)
SeaGlide kit builders first learn about basic electronics and then progress to circuit board soldering and programming with Arduino Pro Mini microcontrollers. They build servo-driven buoyancy engines with large, 100cc syringes and moveable mass to manage buoyancy and pitch. A critical final step is to ballast gliders for proper underwater flight.